神经架构搜索¶
注意
NNI 最新的架构搜索支持都是基于 Retiarii 框架,还在使用 NNI 架构搜索的早期版本 的用户应尽快将您的工作迁移到 Retiarii。我们计划在接下来的几个版本中删除旧的架构搜索框架。
注意
PyTorch 是 Retiarii 唯一支持的框架。有关 Tensorflow 上架构搜索支持的需求在 此讨论 中。另外,如果您打算使用 PyTorch 和 Tensorflow 以外的 DL 框架运行 NAS,请 创建新 issue 让我们知道。
概述¶
自动神经架构搜索 (Neural Architecture Search, NAS)在寻找更好的模型方面发挥着越来越重要的作用。最近的研究证明了自动架构搜索的可行性,并导致模型击败了许多手动设计和调整的模型。其中具有代表性的有 NASNet、 ENAS、 DARTS、 Network Morphism 和 进化算法。此外,新的创新正不断涌现。
总的来说,使用神经架构搜索解决任何特定任务通常需要:搜索空间设计、搜索策略选择和性能评估。这三个组件形成如下的循环(图来自于 架构搜索综述):
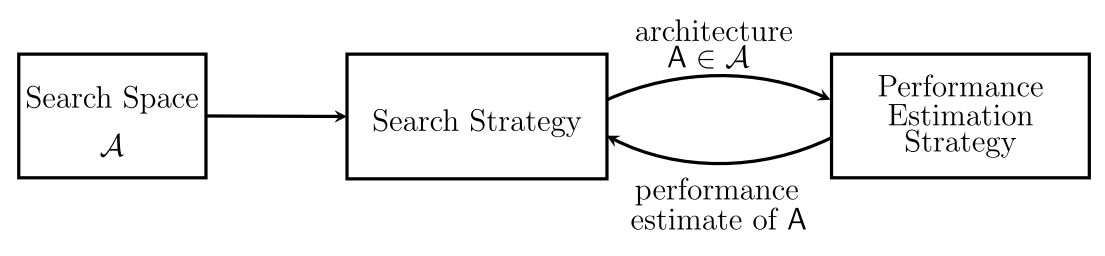
在这个图中:
模型搜索空间 是指一组模型,从中探索/搜索最佳模型,简称为 搜索空间 或 模型空间。
探索策略 是用于探索模型搜索空间的算法。有时我们也称它为 搜索策略。
模型评估者 负责训练模型并评估其性能。
该过程类似于 超参数优化,只不过目标是最佳网络结构而不是最优超参数。具体来说,探索策略从预定义的搜索空间中选择架构。该架构被传递给性能评估以获得评分,该评分表示这个网络结构在特定任务上的表现。重复此过程,直到搜索过程能够找到最优的网络结构。
主要特点¶
NNI 中当前的架构搜索框架由 Retiarii: A Deep Learning Exploratory-Training Framework 的研究支撑,具有以下特点:
为什么使用 NNI 的架构搜索¶
若没有 NNI,实现架构搜索将极具挑战性,主要包含以下三个方面。当用户想在自己的场景中尝试架构搜索技术时,NNI 提供的解决方案可以极大程度上减轻用户的工作量。
搜索空间设计¶
搜索空间定义了架构的可行域集合。为了简化搜索,我们通常需要结合任务相关的先验知识,减小搜索空间的规模。然而,这也引入了人类的偏见,在某种程度上可能会丧失突破人类认知的可能性。无论如何,对于初学者来说,搜索空间设计是一个极具挑战性的任务,因为他们可能无法在简单的空间和丰富的想象力之间取得平衡。
在 NNI 中,我们提供了不同层级的 API 来构建搜索空间。有 高层 API,引入大量先验,帮助用户迅速了解什么是好的架构或搜索空间;也有 底层 API,提供了最底层的算子和图变换原语。
探索策略¶
探索策略定义了如何探索搜索空间(通常是指数级规模的)。它包含经典的探索-利用权衡。一方面,我们希望快速找到性能良好的架构;而另一方面,我们也应避免过早收敛到次优架构的区域。我们往往需要通常通过反复试验找到特定场景的“最佳”探索策略。由于许多近期发表的探索策略都是使用自己的代码库实现的,因此从一个切换到另一个变得非常麻烦。
在 NNI 中,我们还提供了 一系列的探索策略。其中一些功能强大但耗时,而另一些可能不能找到最优架构但非常高效。鉴于所有策略都使用统一的用户接口实现,用户可以轻松找到符合他们需求的策略。
性能评估¶
架构搜索的目标通常是找到能够在测试数据集表现理想的网络结构。性能评估的作用便是量化每个网络的好坏。其主要难点在于可扩展性,即如何在大规模训练平台上同时运行和管理多个试验。
在 NNI 中,我们使用 evaluator 来标准化性能评估流程。它负责估计模型的性能。NNI 内建了不少性能评估器,从最简单的交叉验证,到复杂的自定义配置。评估器在 试验 (trials) 中运行,可以通过我们强大的 训练平台 将试验分发到大规模训练平台上。
教程¶
要开始使用 NNI 架构搜索框架,我们建议至少阅读以下教程:
资源¶
以下文章将有助于更好地了解 NAS 的最新发展: